Understanding the Principle of Universal Motors
A universal motor is a motor that can operate on a constant and direct current. In a single-phase AC motor, the magnetic field excites both the stator and rotor windings simultaneously by commutating current in both windings. In this case, when the voltage increases with time, the angular velocity increases too.
The increase of angular velocity is proportional to the change of winding tension. When the reversal of direction takes place (torque), at t=0, a peak value of torque is obtained; then, it becomes constant and remains constant until t=T (when polarity reverses).
A universal motor is designed to have the characteristics that the torque does not vary with the load current; hence its constant torque characteristics. A universal motor is often used to power accessories such as pumps due to its use of either AC or DC without any change in performance.
Another type of universal motor is the “bidirectional” type, in which it is possible to change direction (reverses polarity) by a simple mechanical switch.
The device can also be used as a DC motor in an AC power supply, but this requires additional circuitry.
Universal motors are used in several industrial applications, including:
A useful configuration for a universal motor with constant torque characteristics is that the back-EMF of each phase should be 90 degrees out of phase with respect to the other (this is required because the magnetic flux linkage between poles A & B must be properly oriented). An alternative way to think about constant torque is that the zero-crossing point (i.e., when the waveform crosses 0 volts) of each phase should coincide with each other.
(If these conditions are not met, it will likely result in undesirable effects such as heating or inefficient operation of the motor.)
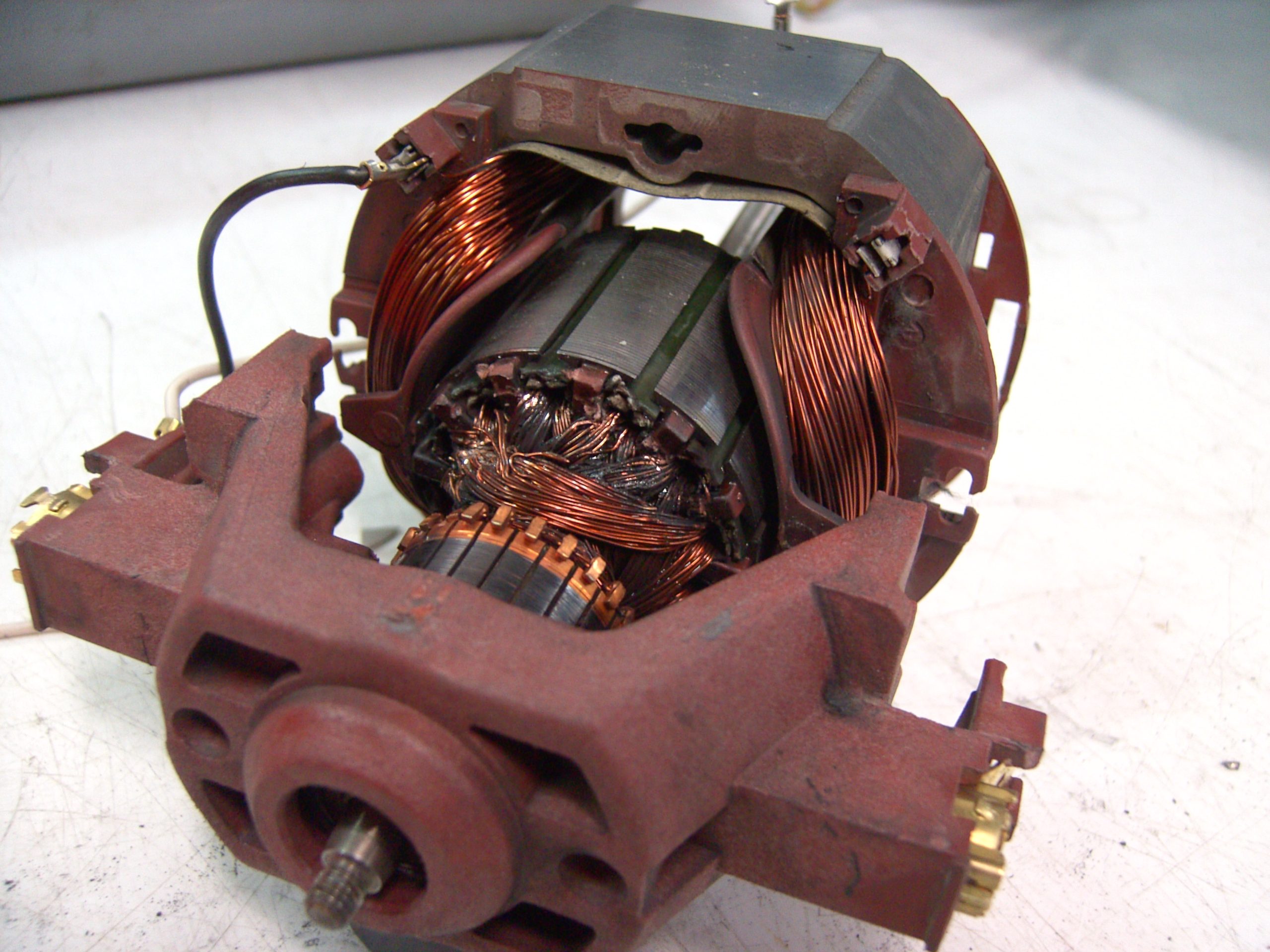
The figure below shows a universal motor where the phases are displaced by 90 degrees and out of phase by 90 degrees. In this example, imagine that the universal motor is connected up to a battery and a resistor (which dissipates power). The back-emf from this configuration will be at 0 volts when the current is maximum, and it will be at its peak value when the current is zero. The peak value will be at the same value as the DC supply voltage, so the peak current is also at its maximum. Since both phases have the same back-emf, they produce equal torques.
In this example, it would be a good idea to use two DC motors and two sets of stationary coils to create a four-pole motor. The first set of coils (north and south) will produce a good torque with constant power (provided that they are energized in phase). The second set of coils (east and west) will have an additional “back-EMF” that would cause them to also produce a constant torque.
Why is it called a universal motor?
Universal motors are a powertrain design in which the transmission of power from one vehicle to another is accomplished through a common transmission. This type of transmission has several advantages over the more traditional CVT. With universal transmissions, all wheels are always connected so that even when one axle is traveling at high speeds, the other axle will still receive power (a powertrain design with single-wheel drive would have its wheels spinning without receiving any power).
Unfortunately, there were two problems with this configuration:
Both these problems can be remedied by using a low-friction fluid coupling that transfers the torque from one shaft to another. The torque can then be transmitted with minimal loss and with much higher efficiency.
Although the design of this type of transmission had been proposed earlier (for instance, the PD-4 Universal Transmission), it was not until 1948 that the first commercially successful example was produced for a truck by General Motors (also known as 4R70, which stands for 4-speed Rear Axle Low). The design was later improved upon and used in many different applications:
It is important to note that because there are no gears in the transmission and because all wheels remain connected at all times, the wheels can be rotated at different speeds without any shifting between gears. This makes this type of transmission ideal for such multi-tasking vehicles as fire engines.
Modern universal transmissions can shift both forward and reverse, giving them full control over the vehicle’s traction (see picture). It also eliminates the need for extra mechanisms for locking one set of wheels (as was done in many older powertrain designs).
Not all parts of a universal transmission are strictly universal. For instance, the gears in certain Ford transmissions are all in one unit and require a specialized gearbox to swap them out (see picture). This makes these transmissions cheaper to produce, but they cannot be upgraded as easily.
You May Also Like

Benefits of Owning a Toyota ...
23 May 2025

The Value of Income Protecti ...
20 June 2023
7 Professions Using 3D Print ...
05 May 2023
Featured In:

Domain Authority

Popular Post


Benefits of Owning a Toyota Camry in San Antonio
May 23, 2025